
The fourth and final official keynote for Computex 2026 comes from NXP. Like all of the other major chip firms at the show, the Dutch chip designer has come to talk about AI. While the other major keynotes have focused at least in part on data center AI, NXP’s expertise is entirely in edge devices. This is part of the reason why they are a major player in the industry, but they have little name recognition outside of it.
Delivering NXP’s keynote for Computex 2006 is CEO Rafael Sotomayor. NXP is a regular presenter for Computex keynotes, though this is Sotomayor’s first keynote as the company’s boss. Sotomayor, in turn, will be delivering a keynote titled “Bringing AI into the Real World: The Future of Physical Intelligence.” It will focus on how NXP is bringing AI to edge devices, particularly physical AI/robotics. And what NXP’s design goals and design strategies are to accomplish this.
As a quick note, this was a live blog-style post that was published a bit later.
NXP Computex 2026 Keynote
And Sotomayor wastes no time on this roughly 40-minute keynote, jumping right in to things once he’s introduced and brought on stage.

His first subject? Soccer, referencing (but not name-dropping) the World Cup, which starts in just a week.
What makes these players elite? It is not fitness or knowledge, because that describes all of the players.

“It’s the mastering of the task. Executing at the highest level.”
Sotomayor sees plenty of examples of physical AI at Computex. And he ponders what “elite” looks like for physical AI devices.
Continuing the soccer analogy, Sotomayor is now talking about Lionel Messi, and his quick reaction and reflexes.

“Excellence is not about thinking harder. It’s about mastering the task so deeply that thinking becomes unnecessary.”
And now, bringing this back to products, he throws up a more generalized example of human reflexes and motion. All the things the audience members are doing without thinking.

Most of human movement (95%) is done with minimal thinking and energy expenditure.
Sotomayor then contends that reflexes are hard, and that Moravec’s Paradox holds that the things that are easy for humans are hard for robots, and vice versa.
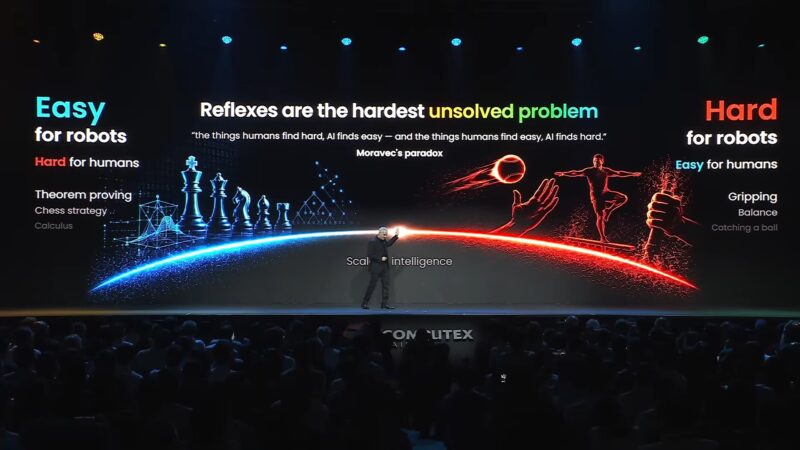
“Reflexes are the hardest thing in robotics.”
Reflexes will be the key to unlocking the full potential of AI.
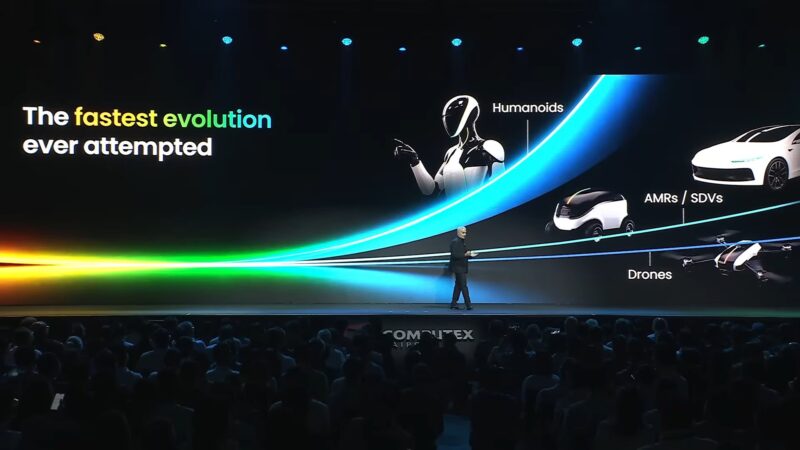
Sotomayor says that we are living through the fastest tech evolution ever. Something amazing is always happening; be it AI, vehicles, etc.
A lot of that is happening in cloud AI. But now AI is moving to the real world – the edge.

The edge is where NXP shines. Highly efficient, highly secure.
As AI moves to the edge, now all these devices get intelligence.
But they still need to solve Moravec’s Paradox.
The answer will come from humans, where it was already solved.
Human intelligence does not entirely reside in the brain; parts of it also reside elsewhere.
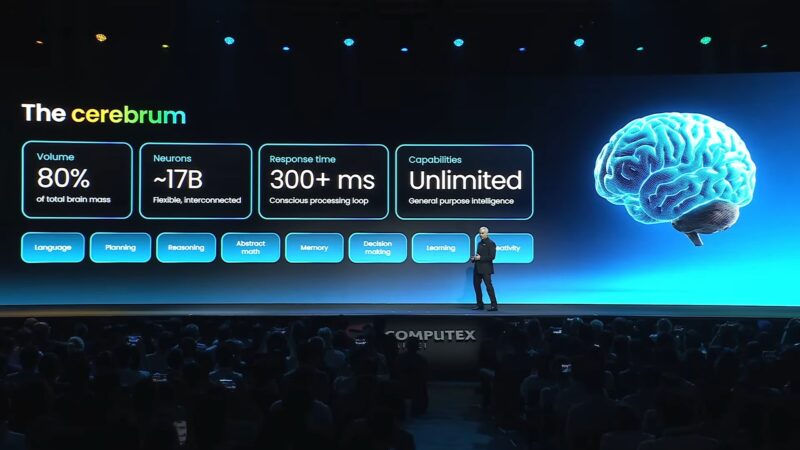
The cerebrum is 80%. Reasoning, decision making, etc.
But this is not where the fastest responses get resolved.
Sotomayor is relating this via a story about also getting run over by a scooter in Taiwan.
The 300ms response time of the cerebrum is too long for quick reactions.
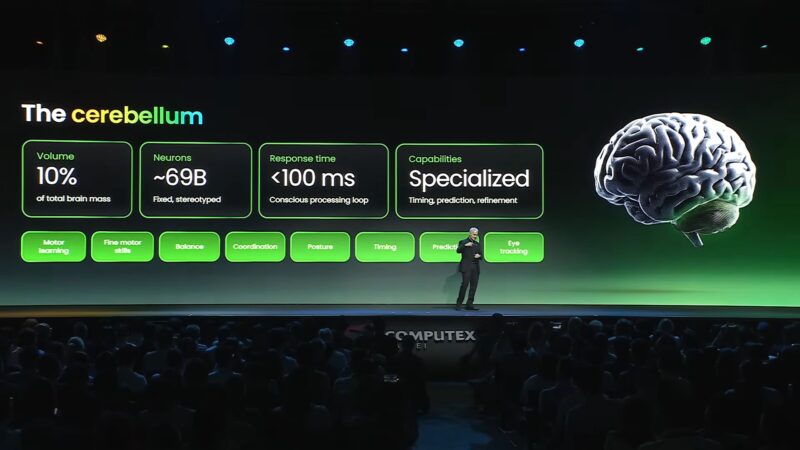
“Think of the cerebellum as the co-processor for motion.”
It is still not fast enough. That brings things to the spinal cord.

A response time of under 40ms. “In this case, latency is more important than intelligence.”
The spinal cord acts independently. This lets it react before the brain can act.
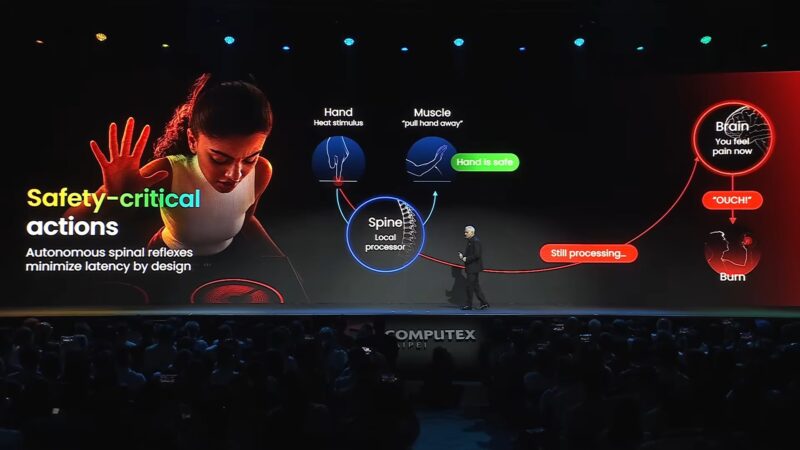
This is also an example of distributed processing.
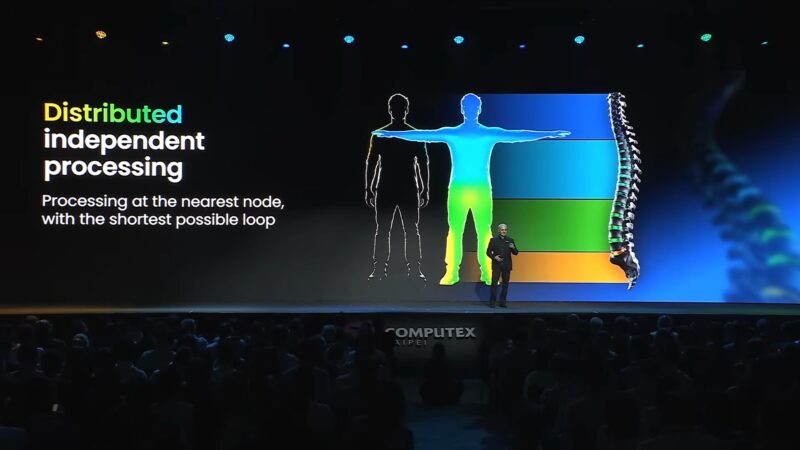
Closer means faster. Faster means safer. And the lowest possible energy use. A billion years of evolutionary optimization.
Real-world intelligence requires across the body.
This requires ultra-low latency, distributed control for no single point of failure, and energy efficiency.
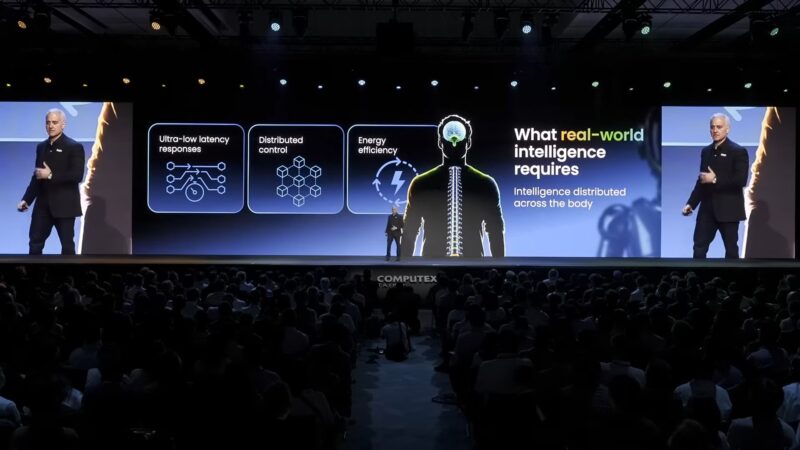
And physical AI/robotics will require the same things. NXP wants to apply the same principles.
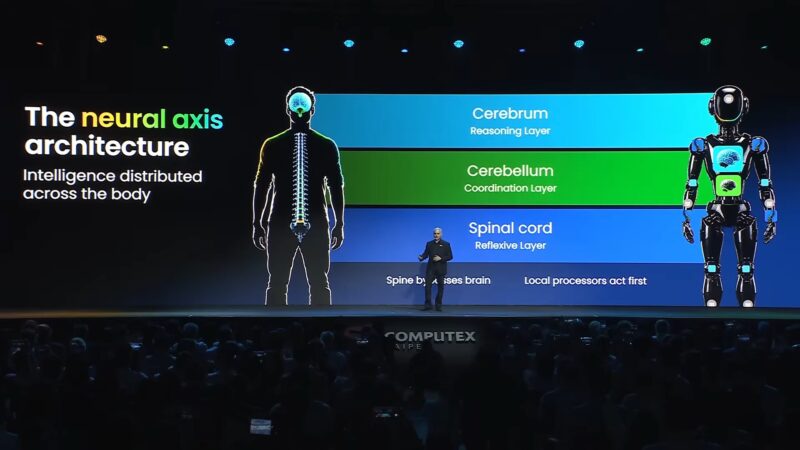
NXP’s neural axis architecture: reasoning, coordination, and reflexive layer.
Now to showcase it in practice using three different form factors: drones, cars, and humanoid robotics.
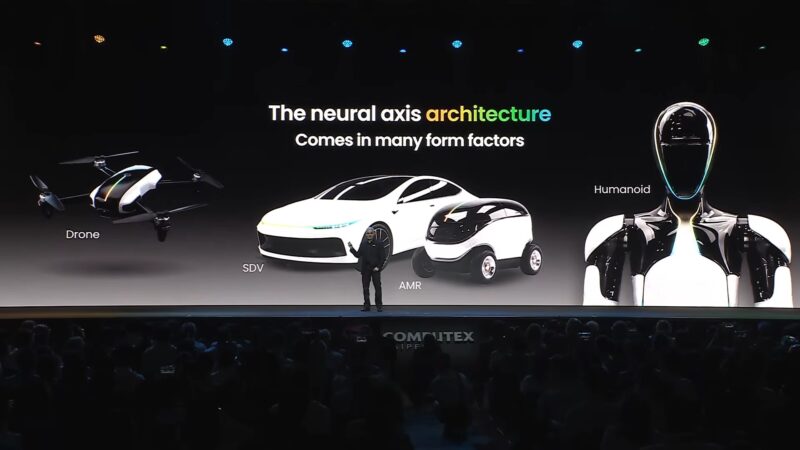
Starting with drones.
The neural axis maps well here. Flight planning is one action, flight balance is another. And the motor controls are reflex layers.
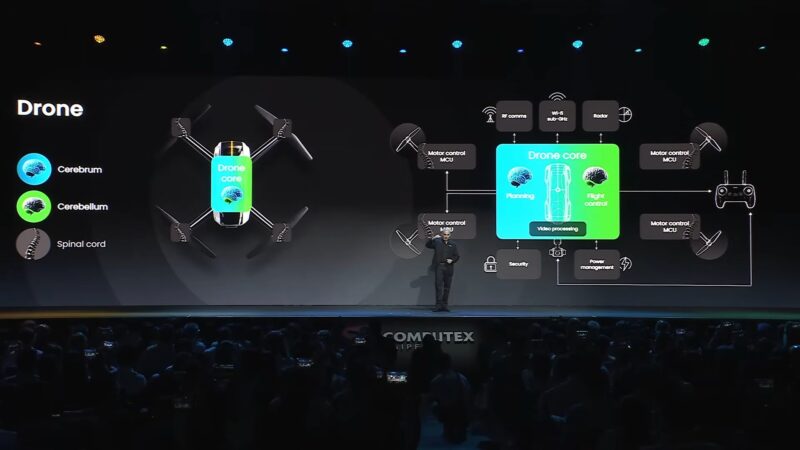
NXP tracks glass-to-glass latency. The full loop is 20ms; missing it can lead to crashes.
This is NXP’s implementation of the neural axis in a drone.
Sotomayor also considers the automotive industry to be a great example of the axis.

Sotomayor believes NXP has leadership here with its 5nm-fabbed S32 processors. As well as their sonar products.
The three separate layers are what make vehicles reliable.
Finally, humanoid robots are the most complex implementation of all.
Even in humanoid robotics, the 3 layers apply/are needed.
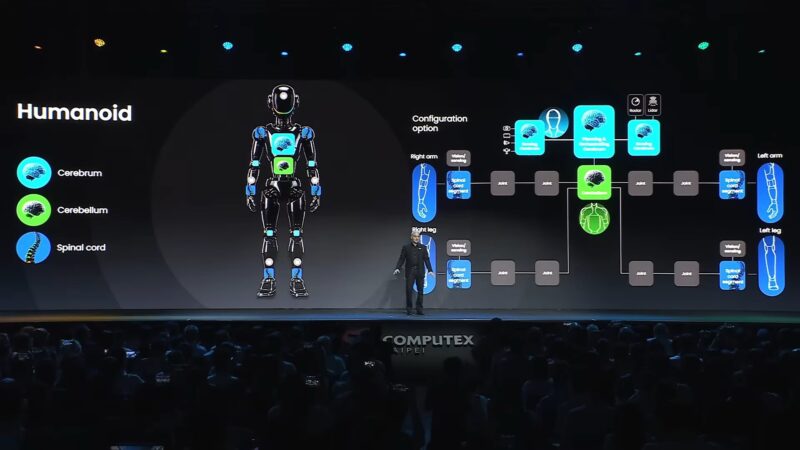
A robot has a collision? Everything needs resolved inside of 40ms.
Processors in the limbs own their function locally.
“Intelligence is not about a bigger brain.” “Think about a neural axis.”
But motion and movement are not the same as understanding.
Not understanding “why” is not okay.
“How do we teach a robot not only how to move, but how to understand?”
Human children learn from experience (and a lot of mistakes).
It creates a physical model in our heads. Falling teaches gravity, etc.
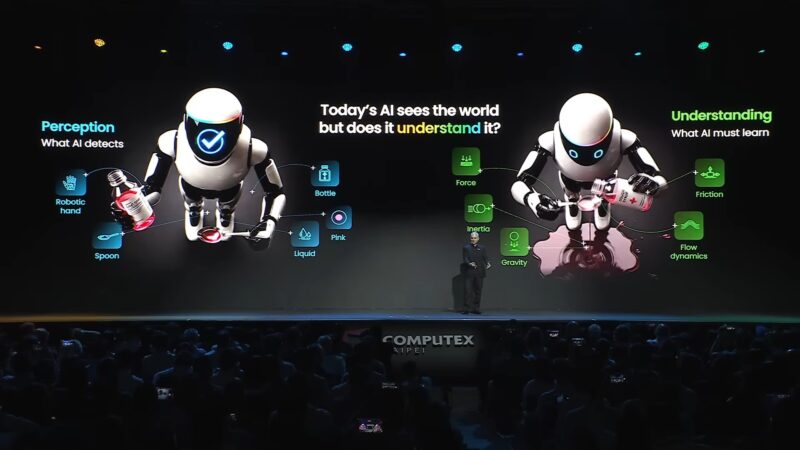
Robots see remarkably well. But does it understand the physics of the bottle and liquid?
Needs to understand inertia and friction.
So a bridge is needed between perception and understanding.
How do you teach robots physics? Today, we do it ourselves. Robots learn from humans.

It is a slow and expensive process.
This is where world models come in. Generate (or inject) knowledge through simulation, rather than physical testing.
Vision Language Action (VLA) models are the bridge between seeing, perceiving, and understanding.
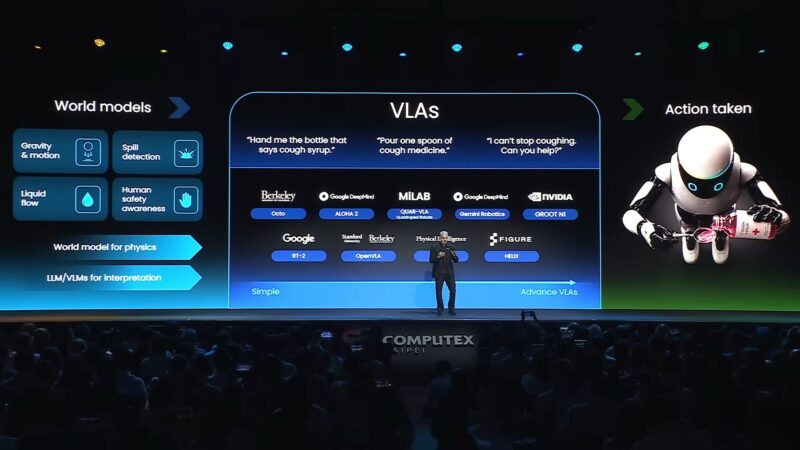
Sotomayor considers it one of the most fascinating research areas in academia.
VLAs continue to get better. Now, how do we get these complex models into constrained edge devices?
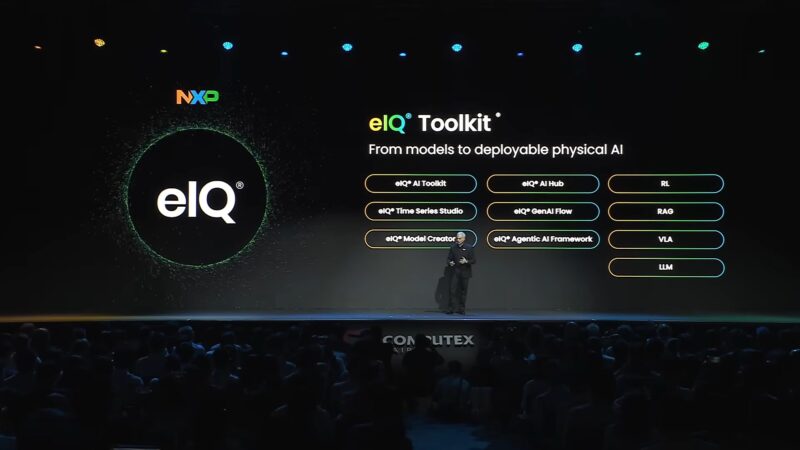
NXP’s answer to that is their eIQ toolkit, which can import, prune, and quantize them for the target use case.
Meanwhile, a robot being useful is not the same as being trustworthy. Trust needs to be solved.

Trust normally takes time. Machines don’t have the time to earn trust; they need to have it designed in from the start.
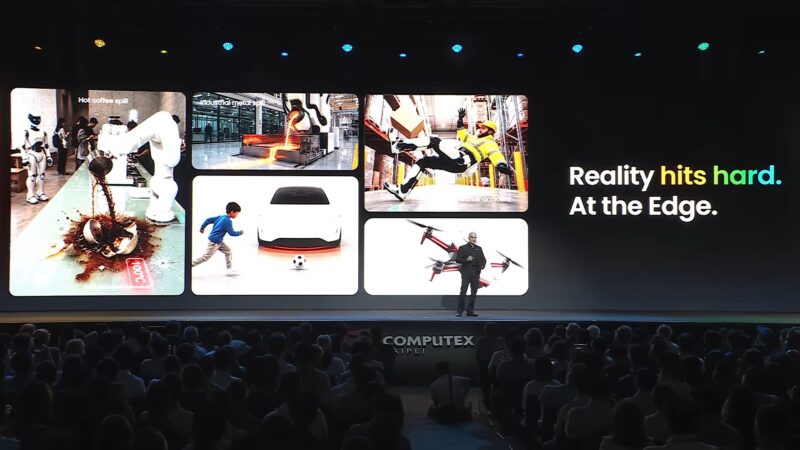
Things will go wrong in the real world despite the best intentions and efforts.
Trust gets defined when things go sideways as the worst possible moment.
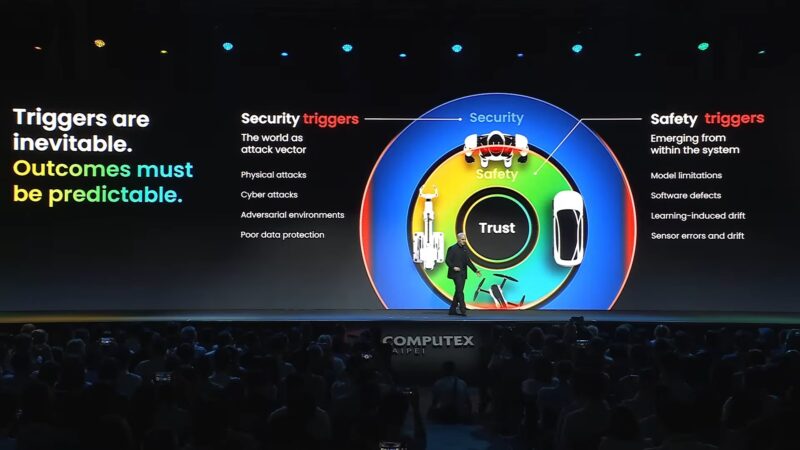
Edge devices must handle both security and safety triggers that challenge these systems.
“Dealing with this is massively important.”
NXP comes from the edge, not the cloud.
How does NXP handle trust? The company has a framework for it.
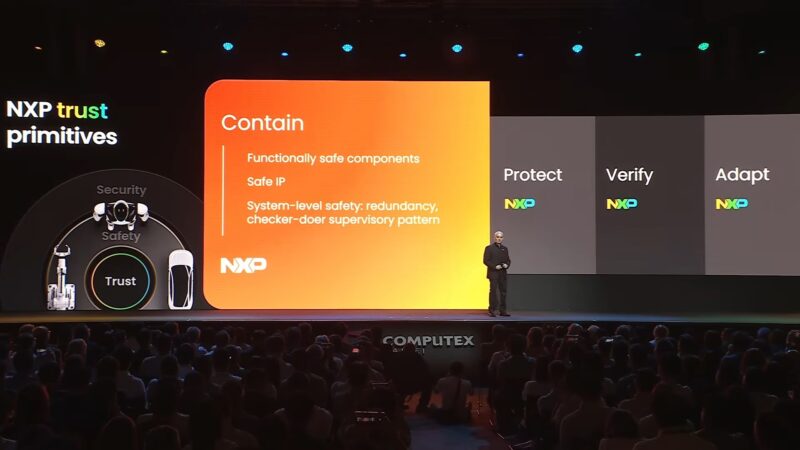
Contain: isolate the problem. Don’t allow a single point of failure.

Protect: security right in the hardware. Protect execution and against tampering.
NXP is post-quantum crypto ready.

Verify: ASIL certification. NXP’s SafeAssure program.

Adapt: Edge devices need to remain secure for years. Need to be field-updatable.
“We take trust very, very seriously at NXP.”
No system can be designed where nothing goes wrong. But they can be designed so that they gracefully handle the failure.

NXP’s job is not to push physical AI before customers are ready for it.
“Earning the right to be useful.”
Sotomayor wants to figure out where physical AI can be safely deployed today and where it creates value.
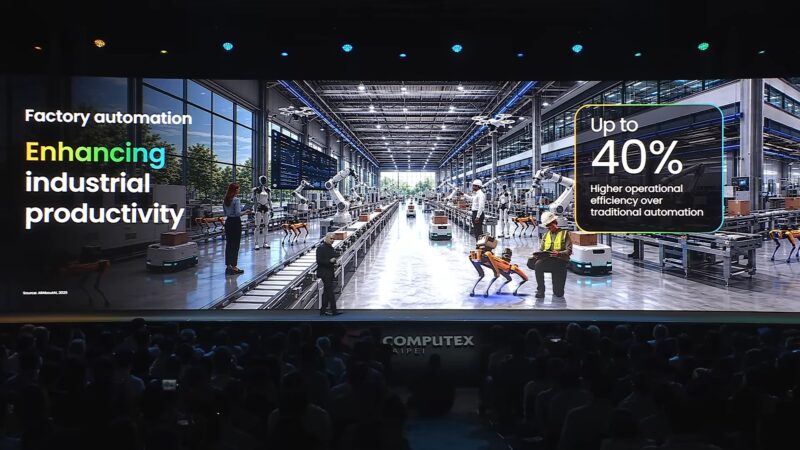
Factory automation being the quintessential example.

Healthcare is also a big field. A 610% increase in lab and diagnostics robots. Safety is critical here.
NXP’s partner, GE Healthcare, is already doing this today.
Sotomayor is now thanking all of NXP’s Taiwanese partners. NXP punches above its weight because of them.
“Thank you, because we do this together.”
Sotomayor is now wrapping things up by summarizing his keynote. And we are back to Messi.

The neural axis is key, whether it is Messi or robotics.
“Elite for a machine is a machine that executes reliably and high-perf in the real world, and when things go wrong it keeps assets and people safe.”
Intelligence cannot be centrally scaled. It needs to be distributed at the point where it is needed.
And that is the NXP keynote.



{kind=link}